Как сделать Arduino на основе управления жестами вашего компьютера?
Контроль жестов рук – не новость. Мы видели много роботов, которые управляются жестами рук. Технология движется так быстро, что все, о чем мы думаем, уже присутствует на рынке. Очень интересным проектом является управление вашим персональным компьютером или ноутбуком с помощью небольшой платы микроконтроллера Arduino Uno. Используя Arduino, мы можем выполнять некоторые простые функции, просто махнув рукой, а не мышью или клавиатурой. Эти функции включают в себя перемещение изображений, прокрутку страниц вверх и вниз, переключение между вкладками веб-браузера, воспроизведение или приостановку видео, переключение между настольными приложениями и т. Д.
 Принципиальная электрическая схема
Принципиальная электрическая схема
Программы для Windows, мобильные приложения, игры - ВСЁ БЕСПЛАТНО, в нашем закрытом телеграмм канале - Подписывайтесь:)
Как выполнять различные операции на ПК с помощью жестов рук?
Теперь, когда мы знаем реферат проекта, давайте двигаться вперед и собирать различную информацию, чтобы начать работать. Сначала мы составим список компонентов, затем кратко их изучим, затем соберем все компоненты, чтобы создать работающую систему.
Шаг 1: Сбор компонентов
Лучший подход к запуску любого проекта – составить список компонентов и провести краткое изучение этих компонентов, потому что никто не захочет зацикливаться на середине проекта только из-за отсутствующего компонента. Список компонентов, которые мы собираемся использовать в этом проекте, приведен ниже:
Шаг 2: Изучение компонентов
Так как у нас есть полный список всех компонентов. Давайте двигаться дальше и кратко рассмотрим работу всех компонентов.
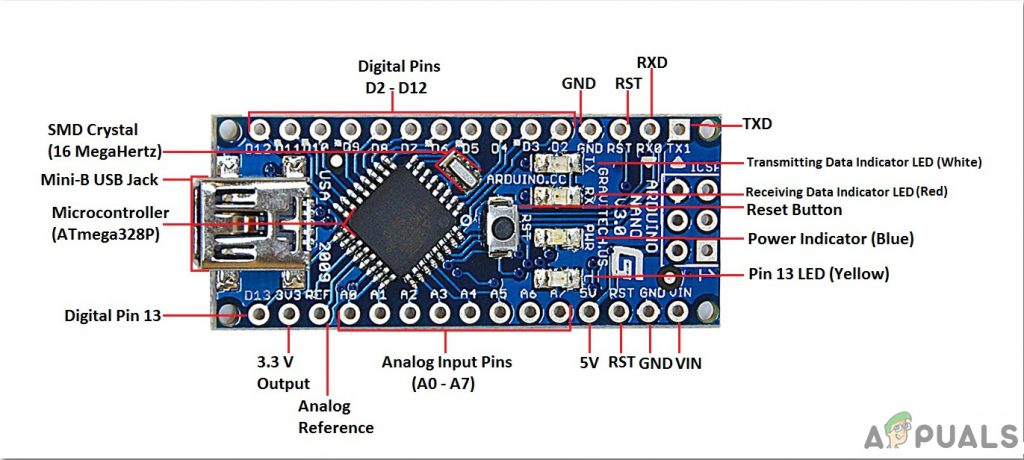
Arduino Nano – это плата микроконтроллера, которая выполняет различные операции в разных цепях. Требуется C-код, который сообщает доске, какие задачи выполнять и как. Он имеет 13 цифровых входов / выходов, что означает, что мы можем управлять 13 различными устройствами. Arduino Nano обладает точно такой же функциональностью, что и Arduino Uno, но довольно небольшого размера. Микроконтроллер на плате Arduino Nano – ATmega328p. Если вы хотите управлять более чем 13 устройствами, используйте Arduino Mega.
 Ардуино Нано
Ардуино Нано
Плата HC-SR04 – это ультразвуковой датчик, который используется для определения расстояния между двумя объектами. Он состоит из передатчика и приемника. Передатчик преобразует электрический сигнал в ультразвуковой сигнал, а приемник преобразует ультразвуковой сигнал обратно в электрический сигнал. Когда передатчик посылает ультразвуковую волну, он отражается после столкновения с определенным объектом. Расстояние рассчитывается с использованием времени, которое требуется ультразвуковому сигналу, чтобы пройти от передатчика и вернуться к приемнику.
 Ультразвуковой датчик
Ультразвуковой датчик
Шаг 3: Сборка компонентов
Теперь, когда мы знаем основные рабочие компоненты, которые мы собираемся использовать. Давайте начнем собирать компоненты, чтобы сделать окончательный рабочий продукт.
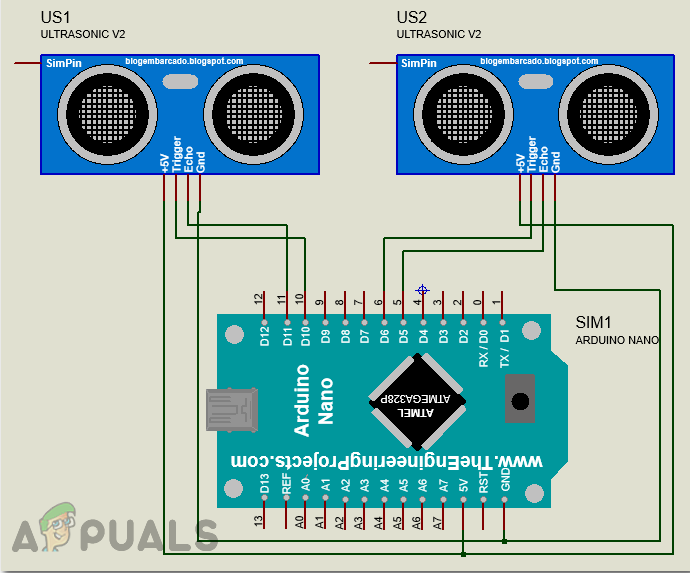
- Подключите контакты Vcc и заземления обоих ультразвуковых датчиков к 5 В и заземлению платы Arduino Nano. Контакт триггера и эхо-сигнала первого ультразвукового датчика подключен к контакту 11 и контакту 10 Arduino Nano соответственно. Триггерный и эхо-контакт второго ультразвукового датчика подключен к контактам 6 и 5 Arduino nano соответственно.
- Прикрепите наноплату Arduino к задней части скотча на экране ноутбука. Оба ультразвуковых датчика будут прикреплены к обоим верхним углам ноутбука.
Шаг 4: Начало работы с Arduino
Если вы еще не знакомы с Arduino IDE, не беспокойтесь, потому что пошаговая процедура настройки и использования Arduino IDE с платой микроконтроллера описана ниже.
- Загрузите последнюю версию Arduino IDE с Arduino.
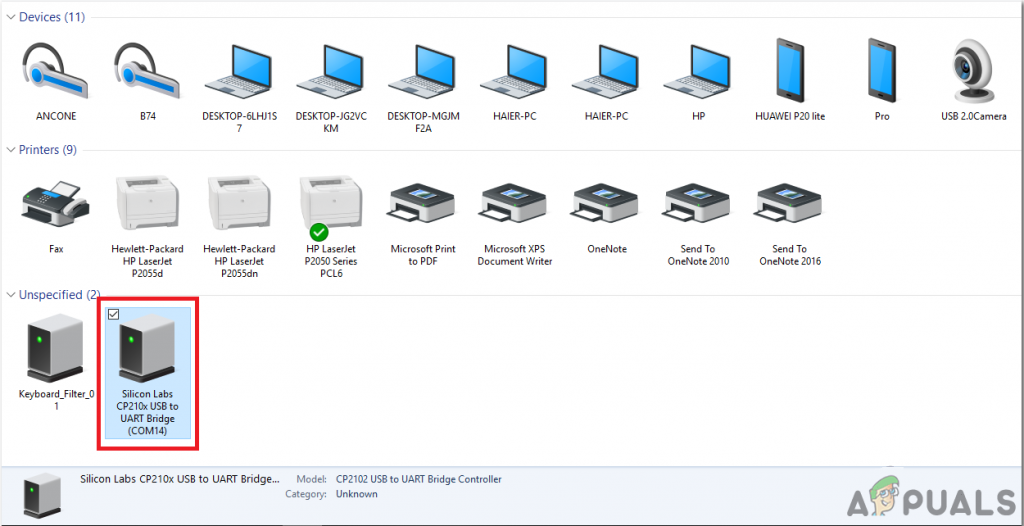
- Подключите плату Arduino Nano к ноутбуку и откройте панель управления. Затем нажмите «Оборудование и звук». Теперь нажмите на Устройства и принтеры. Здесь найдите порт, к которому подключена ваша плата микроконтроллера. В моем случае это COM14, но он отличается на разных компьютерах.
 Поиск порта
Поиск порта - Нажмите на меню «Инструменты» и выберите в раскрывающемся меню плату Arduino Nano.
 Настольная доска
Настольная доска - В том же меню «Инструменты» установите для порта номер порта, который вы видели ранее в «Устройствах и принтерах».
 Настройка порта
Настройка порта - В том же меню «Инструменты» установите для процессора значение «ATmega328P» («Старый загрузчик»).
 процессор
процессор - Загрузите приведенный ниже код и вставьте его в свою Arduino IDE. Нажмите на кнопку загрузки, чтобы записать код на вашей плате микроконтроллера.
 Загрузить
Загрузить
 Поиск порта
Поиск порта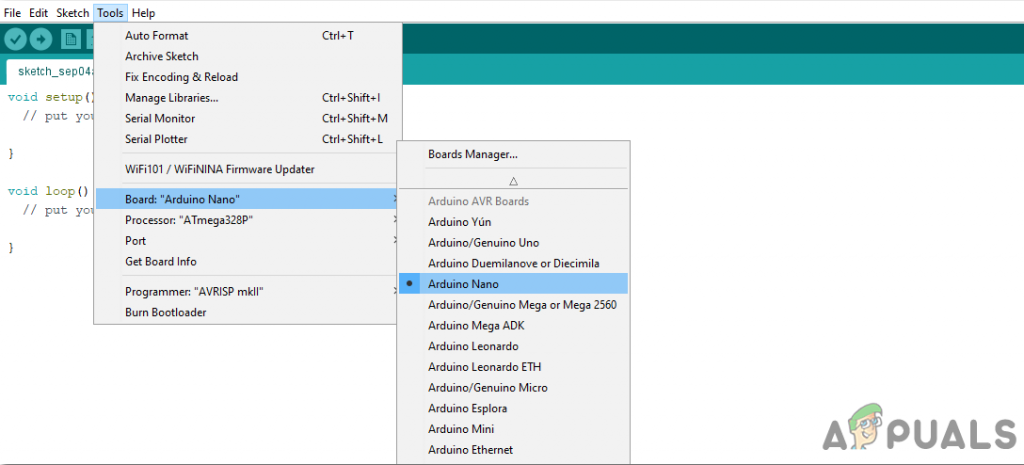 Настольная доска
Настольная доска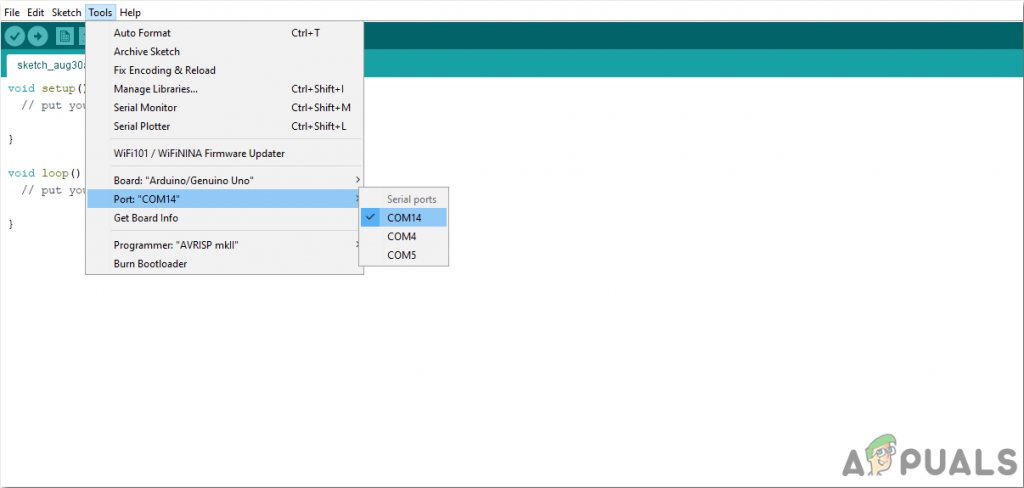 Настройка порта
Настройка порта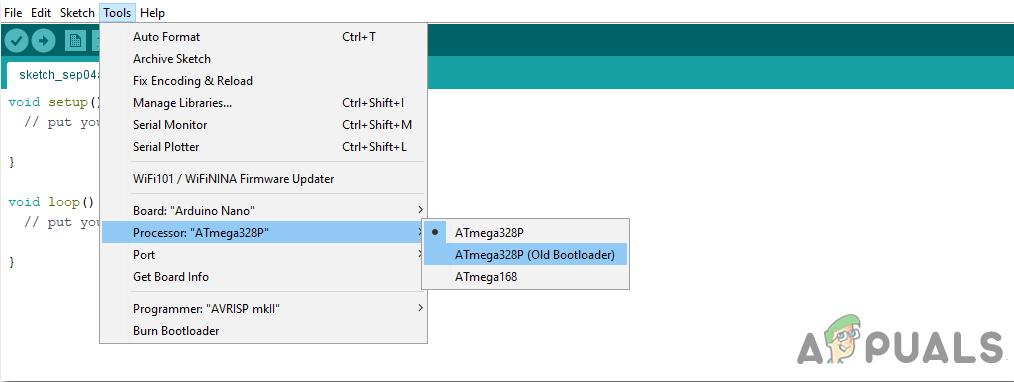 процессор
процессор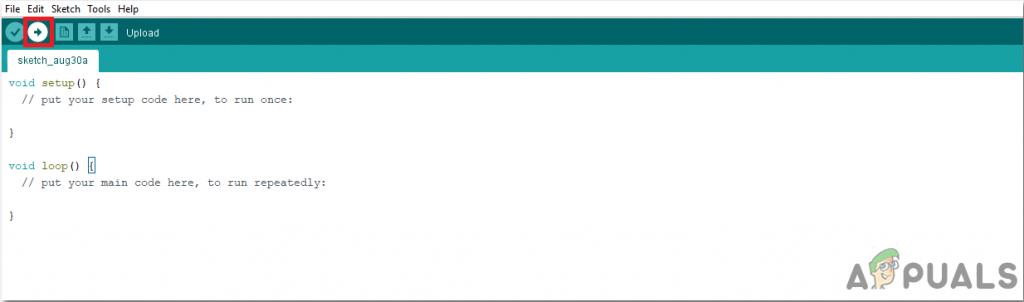 Загрузить
ЗагрузитьЧтобы скачать код, кликните сюда.
Шаг 5: установка жестов
Мы хотим написать код, который будет определять и преобразовывать расстояние в соответствующую команду для выполнения задачи.
давайте сначала составим список всех задач, которые мы хотим выполнить с помощью жестов. Ниже приведен список всех этих задач.
- Переключитесь на следующую или предыдущую вкладку в веб-браузере.
- Прокрутите вверх и вниз на веб-странице.
- Воспроизведение и приостановка видео в VLC Player.
- Увеличивайте и уменьшайте громкость.
- Переключайтесь между двумя задачами.
Теперь мы установим жесты для выполнения всех этих операций.
- Жест 1: положите руку перед правым ультразвуковым датчиком на расстояние от 15 см до 30 см. Через небольшой промежуток времени уберите руку. Это позволит прокрутить страницу вниз и уменьшить громкость.
- Жест 2: Поместите руку перед правым ультразвуковым датчиком на расстоянии примерно 15-30 см. Через небольшой промежуток времени подтолкните руку к ультразвуковому датчику. Это позволит прокрутить веб-страницу вверх и увеличить громкость.
- Жест 3: Чтобы перейти к следующей вкладке, проведите рукой перед правым ультразвуковым датчиком.
- Жест 4: Чтобы перейти к предыдущей вкладке, проведите рукой перед левым ультразвуковым датчиком. Это также будет воспроизводить / приостанавливать ваше видео на плеере VLC.
- Жест 5: для переключения между двумя задачами проведите рукой по обоим датчикам.
Мы написали код и выполнили все условия, основанные на вышеуказанных жестах. И следует отметить, что мы используем Google Chrome в качестве нашего веб-браузера и VLC Media Player в качестве нашего медиа-приложения.
Шаг 6: Понимание кода Arduino
Мы написали код, который преобразует 5 жестов в цифровую команду. эта команда отправляется на последовательный порт. Мы напишем программу на Python для интерпретации этих команд и выполнения некоторых функций клавиатуры для выполнения различных задач.
1. В начале инициализируются все контакты, которые мы хотим соединить с датчиками. Различные переменные также инициализируются для хранения данных для расчета времени и расстояния.
const int trigPin1 = 11; // активировать выходной контакт (датчик 1)
const int echoPin1 = 10; // эхо входной контакт (датчик 1)
const int trigPin2 = 6; // активировать выходной контакт (датчик 2)
const int echoPin2 = 5; // эхо входной контакт (датчик 2)
// переменные, используемые для расчета расстояния
большая продолжительность;
int distance1, distance2;
float r;
длинная беззнаковая температура = 0;
int temp1 = 0;
int l = 0;
2. Мы написали функцию void find_distance (void), чтобы рассчитать расстояние до обоих ультразвуковых датчиков. Лучше не запускать оба ультразвуковых датчика одновременно, потому что это может вызвать некоторые помехи. Эта функция вернет расстояние в см.
void find_distance (void)
{
digitalWrite (trigPin1, LOW);
delayMicroseconds (2);
digitalWrite (trigPin1, HIGH);
delayMicroseconds (10);
digitalWrite (trigPin1, LOW);
длительность = pulseIn (echoPin1, HIGH, 5000);
r = 3,4 * продолжительность / 2; // расчет для получения измерения в сантиметрах, используя время, возвращаемое функцией pulsein.
расстояние1 = об / 100,00;
digitalWrite (trigPin2, LOW);
delayMicroseconds (2);
digitalWrite (trigPin2, HIGH);
delayMicroseconds (10);
digitalWrite (trigPin2, LOW);
длительность = pulseIn (echoPin2, HIGH, 5000);
r = 3,4 * продолжительность / 2;
расстояние2 = об / 100,00;
задержки (100);
}
3. void setup () – это функция, которая инициализирует все контакты, которые будут использоваться как INPUT или OUTPUT. Скорость передачи данных также устанавливается в этой функции. Скорость передачи – это скорость, с которой плата микроконтроллера взаимодействует с подключенными датчиками.
настройка void ()
{
Serial.begin (9600);
pinMode (trigPin1, OUTPUT); // инициализируем выводы триггера и эха обоих датчиков как вход и выход:
pinMode (echoPin1, INPUT);
pinMode (trigPin2, OUTPUT);
pinMode (echoPin2, INPUT);
задержка (1000);
}
4. void loop () – это функция, которая многократно запускается в цикле. В этом цикле мы вычисляем расстояние во многих случаях и применяем условия для обнаружения жеста.
void loop ()
{
find_distance ();
если (distance2<=35 && distance2>= 15)
{
Темп = Миллис ();
в то время как (Миллис () <= (температура + 300))
find_distance ();
если (distance2<=35 && distance2>= 15)
{
Темп = distance2;
while (distance2 <= 50 || distance2 == 0)
{
find_distance ();
если ((температура + 6)
{
Serial.println ( “вверх”);
}
}
}
еще
{
Serial.println ( “следующий”);
}
}
еще если (расстояние1<=35 && distance1>= 15)
{
Темп = Миллис ();
в то время как (Миллис () <= (температура + 300))
{
find_distance ();
если (distance2<=35 && distance2>= 15)
{
Serial.println ( “Изменение”);
л = 1;
ломать;
}
}
если (л == 0)
{
Serial.println ( “предыдущий”);
в то время как (distance1<=35 && distance1>= 15)
find_distance ();
}
л = 0;
}
}
Шаг 7: программирование на Python
Мы установим PyAutoGUI и вызовем различные команды клавиатуры, просто читая входящие последовательные данные. С помощью этой программы мы можем имитировать многие операции мыши и клавиатуры, такие как щелчок левой или правой кнопки мыши или любое нажатие клавиши клавиатуры.
Сначала мы установим PIP на наши окна. Это простая процедура. кликните сюда чтобы открыть видео-руководство по установке pip на ваш компьютер. После установки PIP на нашем компьютере мы продолжим и установим pyAutoGUI. Для этого введите в командной строке следующую команду
python -m pip установить pyautogui
Эта команда установит puAutoGUI на ваш компьютер. Если до сих пор все идет хорошо, давайте продолжим и напишем программу на python для вызова различных клавиатурных команд. Поскольку мы получаем 5 различных команд в последовательном вводе с помощью кода Arduino, код Python может преобразовать эти команды в определенные команды клавиатуры следующим образом.
- Данные: «следующий» —–> Действие: «Ctrl + PgDn»
- Данные: «предыдущий» —–> Действие: «Ctrl + PgUp»
- Данные: «вниз» —–> Действие: «Стрелка вниз»
- Данные: «вверх» —–> Действие: «Стрелка вверх»
- Данные: «изменить» —–> Действие: «Alt + Tab»
Python можно использовать для программирования Arduino, просто импортировав pyfirmata, который может связывать Arduino с Python. Ниже приведен код Python, который потребуется для запуска проекта:
импортировать серийный номер добавить последовательную библиотеку для последовательной связи
import pyautogui # добавить библиотеку pyautogui для программного управления мышью и клавиатурой.
Arduino_Serial = serial.Serial (‘com12’, 9600) # Инициализировать последовательный и создать объект последовательного порта с именем Arduino_Serial
пока 1:
входящих_данных = str (Arduino_Serial.readline ()) # читать последовательные данные и печатать их в виде строки
напечатать входящие_данные # распечатать входящие серийные данные
if ‘next’ в прибывающих данных: # если входящие данные ‘next’
pyautogui.hotkey (‘ctrl’, ‘pgdn’) # выполнить операцию “ctrl + pgdn”, которая переходит на следующую вкладку
if ‘previous’ во входящих_данных: # если входящие данные ‘предыдущие’
pyautogui.hotkey (‘ctrl’, ‘pgup’) # выполнить операцию “ctrl + pgup”, которая переместится на предыдущую вкладку
if ‘down’ в input_data: # если входящие данные ‘down’
# pyautogui.press (‘down’) # выполняет операцию “стрелка вниз”, которая прокручивает страницу вниз
pyautogui.scroll (-100)
if ‘up’ в input_data: # если входящие данные ‘up’
# pyautogui.press (‘up’) # выполняет операцию “стрелка вверх”, которая прокручивает страницу вверх
pyautogui.scroll (100)
if ‘change’ incoming_data: # если входящие данные ‘change’
pyautogui.keyDown (‘alt’) # выполняет операцию “alt + tab”, которая переключает вкладку
pyautogui.press ( ‘Вкладка’)
pyautogui.keyUp ( ‘альт’)
входящие_данные = “”; # очищает данные
Это был самый простой способ управлять своим компьютером с помощью жестов рук. Выполните все шаги, упомянутые выше, и наслаждайтесь управлением своим ПК рукой, а не клавиатурой и мышью.
Программы для Windows, мобильные приложения, игры - ВСЁ БЕСПЛАТНО, в нашем закрытом телеграмм канале - Подписывайтесь:)