
Как сделать препятствие избегая робота с помощью Arduino?
Мир движется быстро, и технологии также движутся вместе с ним в области робототехники. Приложения робототехники можно увидеть повсюду в мире. Концепция мобильных или автономных роботов, которые перемещаются без какой-либо внешней помощи, является самой глубокой областью исследований. Существует так много типов мобильных роботов, например, интерпретаторы Self Localization and Mapping (SLAM), слежение за линией, боты сумо и т. Д. Робот, избегающий препятствий, является одним из них. Он использует технику, чтобы изменить путь, если он обнаруживает любое препятствие на своем пути.
 (Изображение предоставлено: Дайджест схемы)
(Изображение предоставлено: Дайджест схемы)
Программы для Windows, мобильные приложения, игры - ВСЁ БЕСПЛАТНО, в нашем закрытом телеграмм канале - Подписывайтесь:)
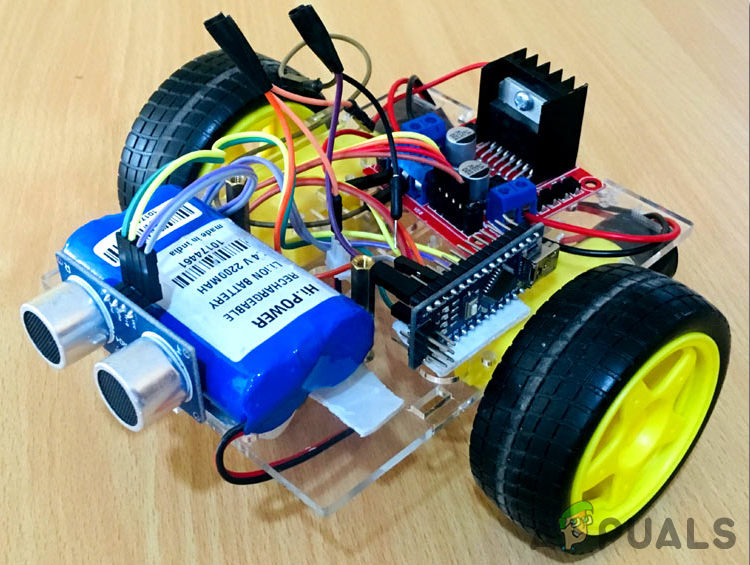
В этом проекте разработан робот, избегающий препятствий на основе Arduino, который будет использовать ультразвуковой датчик для обнаружения всех препятствий на своем пути.
Как избежать препятствий с помощью ультразвукового датчика?
Поскольку мы знаем реферат нашего проекта, давайте сделаем шаг вперед и соберем немного информации для начала проекта.
Шаг 1: Сбор компонентов
Лучший подход к запуску любого проекта – составить список полных компонентов в начале и кратко изучить каждый компонент. Это помогает нам избежать неудобств в середине проекта. Полный список всех компонентов, используемых в этом проекте, приведен ниже.
Шаг 2: Изучение компонентов
Теперь, когда у нас есть полный список всех компонентов, давайте сделаем шаг вперед и кратко рассмотрим работу каждого компонента.
Arduino nano – это макроконтроллерная плата, удобная для макета, которая используется для управления или выполнения различных задач в цепи. Мы записываем код C на Arduino Nano, чтобы сообщить плате микроконтроллера, как и какие операции выполнять. Arduino Nano обладает точно такой же функциональностью, что и Arduino Uno, но довольно небольшого размера. Микроконтроллер на плате Arduino Nano – ATmega328p.
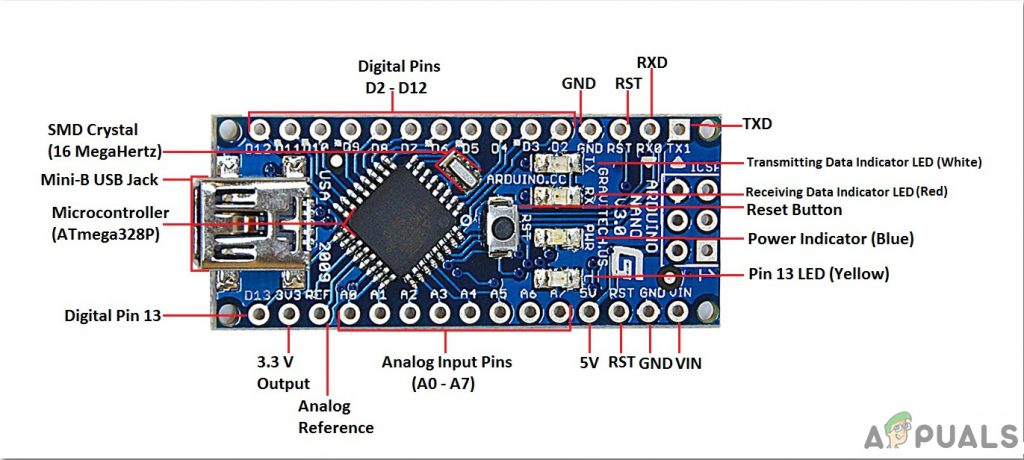 Ардуино Нано
Ардуино Нано
L298N представляет собой интегральную схему с высоким током и высоким напряжением. Это двойной полный мост, разработанный для принятия стандартной логики TTL. Он имеет два входных входа, которые позволяют устройству работать независимо. Два двигателя могут быть подключены и работать одновременно. Скорость двигателей варьируется через штырьковые шипы. Широтно-импульсная модуляция (ШИМ) – это метод, в котором можно контролировать поток напряжения в любом электронном компоненте. Этот модуль имеет H-мост, который отвечает за управление направлением вращения в двигателях путем инвертирования направления тока. Вывод разрешения A и вывод разрешения B используются для изменения скорости обоих двигателей. Этот модуль может работать между 5 и 35 В и пиковым током до 2 А. Входной контакт 1 и входной контакт 2 и для первого двигателя и входной контакт 3 и входной контакт 4 предназначены для второго двигателя.
 L298N Драйвер мотора
L298N Драйвер мотора
Плата HC-SR04 – это ультразвуковой датчик, который используется для определения расстояния между двумя объектами. Он состоит из передатчика и приемника. Передатчик преобразует электрический сигнал в ультразвуковой сигнал, а приемник преобразует ультразвуковой сигнал обратно в электрический сигнал. Когда передатчик посылает ультразвуковую волну, он отражается после столкновения с определенным объектом. Расстояние рассчитывается с использованием времени, которое требуется ультразвуковому сигналу, чтобы пройти от передатчика и вернуться к приемнику.
 Ультразвуковой датчик
Ультразвуковой датчик
Шаг 3: Сборка компонентов
Теперь, когда мы теперь знаем работу большинства используемых компонентов, давайте начнем собирать все компоненты и создать робота, избегающего препятствий.
- Возьмите автомобильные колесные каркасы и наклейте макет на его верх. Установите ультразвуковой датчик в передней части шасси и крышку батарейного отсека за шасси.
- Закрепите плату Arduino Nano на макетной плате и прикрепите привод мотора прямо за макетной платой на шасси. Подключите контакты включения обоих двигателей к контактам 6 и 9 от Arduino nano. Контакты In1, In2, In3 и In4 модуля драйвера двигателя подключены к контактам 2, 3, 4 и 5 Arduino nano соответственно.
- Триггерный и эхо-контакт ультразвукового датчика подключен к контактам 11 и 10 на Arduino nano соответственно. Vcc и контакт заземления ультразвукового датчика подключены к 5 В и заземлению Arduino Nano.
- Модуль контроллера мотора питается от батареи. Плата Arduino Nano получает питание от порта 5 В модуля драйвера двигателя, а ультразвуковой датчик получает питание от платы Arduino Nano. вес и энергия аккумуляторов могут стать определяющим фактором их работы.
- Убедитесь, что ваши соединения такие же, как показано ниже на принципиальной схеме.
 Принципиальная электрическая схема
Принципиальная электрическая схема
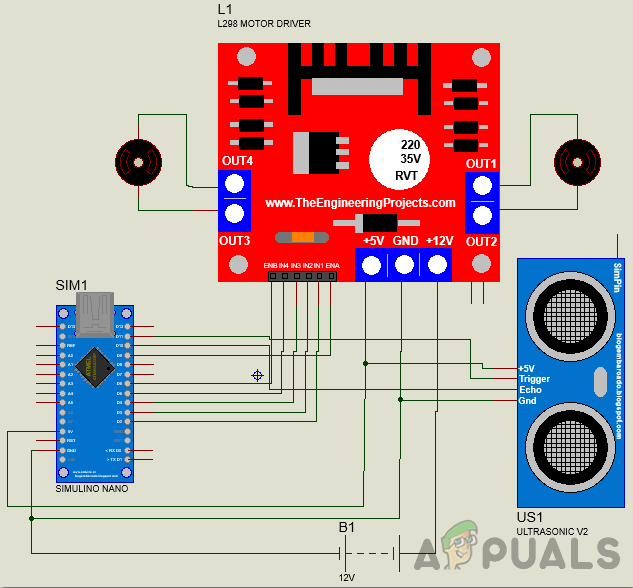 Принципиальная электрическая схема
Принципиальная электрическая схемаШаг 4: Начало работы с Arduino
Если вы еще не знакомы с Arduino IDE, не беспокойтесь, потому что пошаговая процедура настройки и использования Arduino IDE с платой микроконтроллера описана ниже.
- Загрузите последнюю версию Arduino IDE с Arduino.
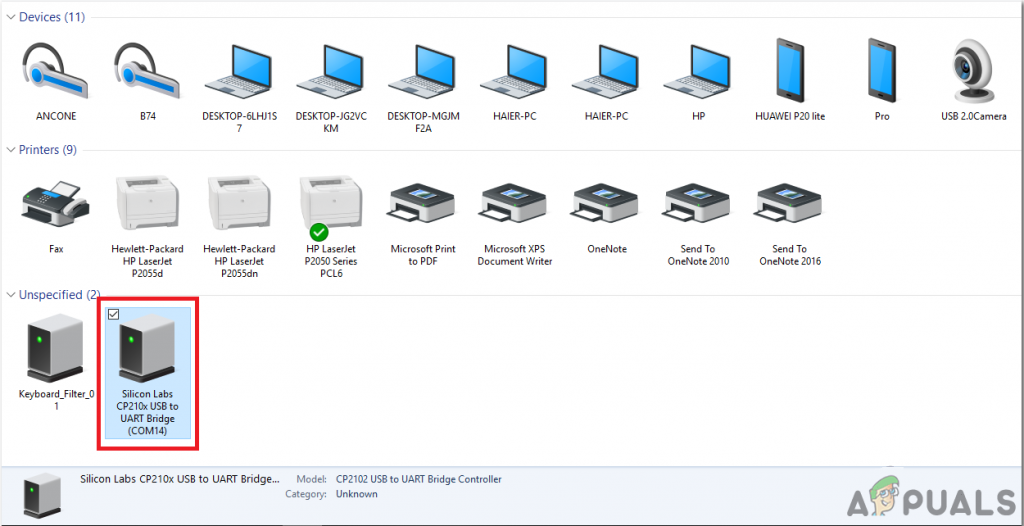
- Подключите плату Arduino Nano к ноутбуку и откройте панель управления. на панели управления нажмите на Оборудование и звук. Теперь нажмите на устройства и принтеры. Здесь найдите порт, к которому подключена ваша плата микроконтроллера. В моем случае это COM14, но он отличается на разных компьютерах.
 Поиск порта
Поиск порта - Нажмите на меню инструментов. и установите плату Arduino Nano из выпадающего меню.
 Настольная доска
Настольная доска - В том же меню «Инструменты» установите для порта номер порта, который вы видели ранее в «Устройствах и принтерах».
 Настройка порта
Настройка порта - В том же меню «Инструменты» установите для процессора значение «ATmega328P» («Старый загрузчик»).
 процессор
процессор - Загрузите приведенный ниже код и вставьте его в свою Arduino IDE. Нажмите на кнопку загрузки, чтобы записать код на вашей плате микроконтроллера.
 Загрузить
Загрузить
 Поиск порта
Поиск порта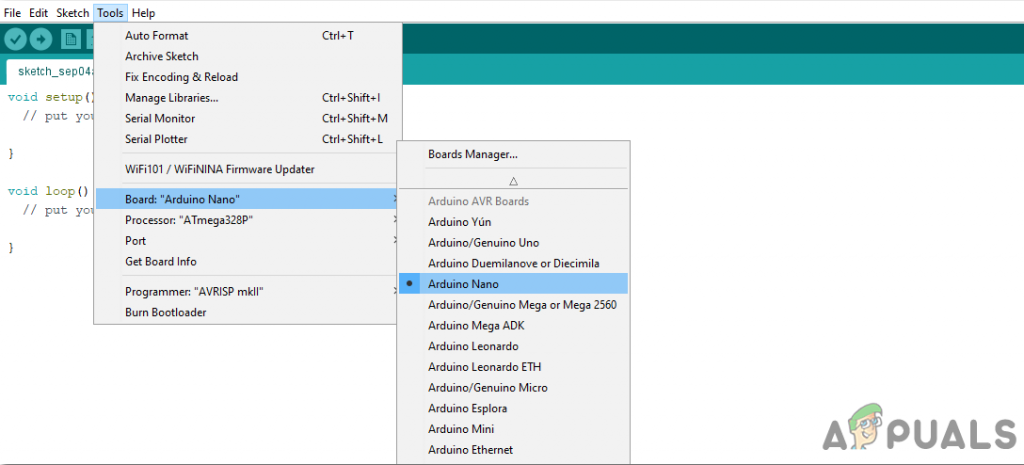 Настольная доска
Настольная доска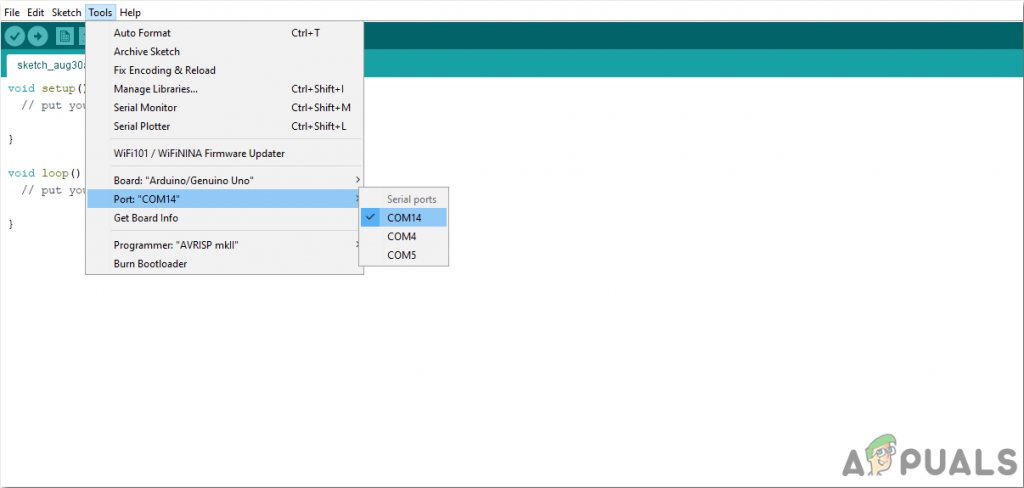 Настройка порта
Настройка порта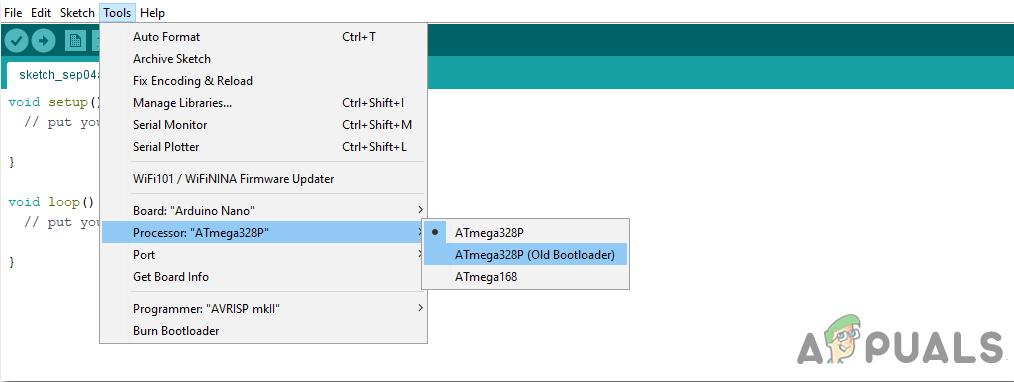 процессор
процессор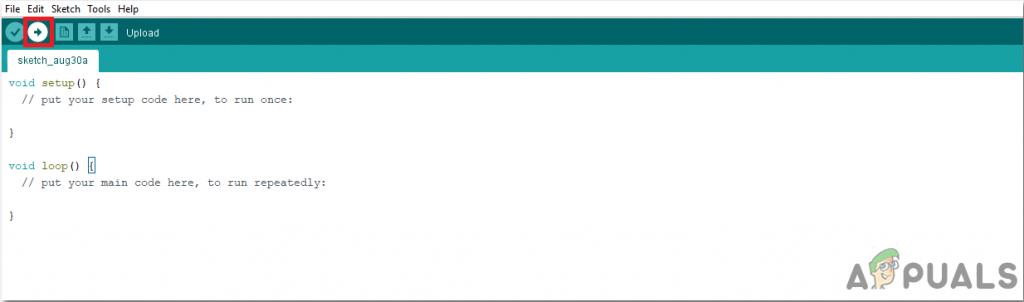 Загрузить
ЗагрузитьЧтобы скачать код, кликните сюда.
Шаг 5: Понимание кода
Код хорошо прокомментирован и не требует пояснений. Но все же, это объясняется ниже
1. В начале кода инициализируются все контакты платы Arduino Nano, подключенные к ультразвуковому датчику и модулю привода двигателя. Pin6 и Pin9 – это выводы PWM, которые могут изменять поток напряжения для изменения скорости робота. Две переменные, продолжительность и расстояние инициализируются для хранения данных, которые впоследствии будут использоваться для расчета расстояния ультразвукового датчика и препятствия.
int enable1pin = 6; // Пины для первого мотора
int motor1pin1 = 2;
int motor1pin2 = 3;
int enable2pin = 9; // Контакты для второго мотора
int motor2pin1 = 4;
int motor2pin2 = 5;
const int trigPin = 11; // Пусковой контакт ультразвукового Сеснора
const int echoPin = 10; // Echo Pin ультразвукового Sesnor
большая продолжительность; // переменные для расчета расстояния
дистанция плавания;
2. void setup () – это функция, которая используется для установки всех используемых выводов, таких как INPUT и OUTPUT. Скорость передачи данных определяется в этой функции. Скорость в бодах – это скорость связи, посредством которой плата микроконтроллера взаимодействует с интегрированными в нее датчиками.
настройка void ()
{
Serial.begin (9600);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
pinMode (enable1pin, OUTPUT);
pinMode (enable2pin, OUTPUT);
pinMode (motor1pin1, OUTPUT);
pinMode (motor1pin2, OUTPUT);
pinMode (motor2pin1, OUTPUT);
pinMode (motor2pin2, OUTPUT);
}
3. void loop () – это функция, которая повторяется в цикле. В этой функции мы сообщаем плате микроконтроллера, как и какие операции выполнять. Здесь, во-первых, триггерный вывод настроен на отправку сигнала, который будет обнаружен эхо-контактом. Затем рассчитывается время, которое требуется ультразвуковому сигналу для перемещения от датчика и обратно к датчику, и сохраняется в переменной длительности. Затем это время используется в формуле для расчета расстояния до препятствия и ультразвукового датчика. Затем применяется условие, что если расстояние больше 5 см, робот будет двигаться вперед по прямой линии, а если расстояние меньше 50 см, робот сделает крутой поворот вправо.
void loop ()
{
digitalWrite (trigPin, LOW); // Отправка и обнаружение ультразвукового сигнала
delayMicroseconds (2);
digitalWrite (trigPin, HIGH);
delayMicroseconds (10);
digitalWrite (trigPin, LOW);
длительность = pulseIn (echoPin, HIGH); // Вычисление времени, принимаемого ультразвуковой волной для отражения назад
расстояние = 0,034 * (длительность / 2); // Расчет расстояния между тобой и роботом и препятствием.
if (distance> 50) // Двигаться вперед, если расстояние больше 50 см
{
digitalWrite (enable1pin, HIGH);
digitalWrite (enable2pin, HIGH);
digitalWrite (motor1pin1, HIGH);
digitalWrite (motor1pin2, LOW);
digitalWrite (motor2pin1, HIGH);
digitalWrite (motor2pin2, LOW);
}
иначе if (distance <50) // Резкий поворот направо, если расстояние меньше 50 см { digitalWrite (enable1pin, HIGH); digitalWrite (enable2pin, HIGH); digitalWrite (motor1pin1, HIGH); digitalWrite (motor1pin2, LOW); digitalWrite (motor2pin1, LOW); digitalWrite (motor2pin2, LOW); } задержки (300); }
Приложения
Итак, здесь была процедура создания робота, избегающего препятствий. Эту технологию избегания препятствий можно использовать и в других приложениях. Некоторые из этих приложений следующие.
- Система слежения.
- Цели измерения расстояния.
- Это может быть использовано в автоматических пылесосах роботов.
- Это может быть использовано в палках для слепых людей.
Программы для Windows, мобильные приложения, игры - ВСЁ БЕСПЛАТНО, в нашем закрытом телеграмм канале - Подписывайтесь:)